╚╦Ą─č█Š”╩ŪĖąėXų«┤░Ż¼╚╦ėą80%ęį╔ŽĄ─ą┼Žó┐┐č█Š”½@╚ĪĪŻ╚╦č█ų«╦∙ęį─▄┐┤ŪÕ│■¢|╬„ ╩Ūę“×ķč█Š”ųąėą200ČÓ╚féĆęĢėX╔±Įø(j©®ng)īó╣ŌīWą┼╠¢╦═Ž“ęĢŠW(w©Żng)─żŻ¼ęĢŠW(w©Żng)─żėųīó╣ŌīWą┼╠¢▐D(zhu©Żn)ūā │╔╔±Įø(j©®ng)├}ø_é„Ž“┤¾─XŻ¼Å─Č°ūī╚╦─▄ē“┐┤ęŖ╬’¾wĄ─Ņü╔½║═ą╬ĀŅĄ╚ĪŻ─▄ʱįņ│÷Ī░╚╦╣żč█Š”Ī▒ūī Ę■äšÖCŲ„╚╦ę▓─▄Ž±╚╦─Ūśė┐┤ŪÕ│■¢|╬„Ż¼▀@╩ŪĘ■äšÖCŲ„╚╦Ą─ųžę¬šnŅ}ĪŻėąĻP(gu©Īn)Ę■äšÖCŲ„╚╦ Ī░č█Š”Ī▒Ą─ūRäe└Ēšō║═ĘĮĘ©╝░╝╝ąg(sh©┤)Įy(t©»ng)ĘQ×ķ─Ż╩ĮūRäeŻ¼╦∙ų^─Ż╩Į╩ŪųĖ▒╗ūRäeĄ─╩┬╬’Ż¼╦³┐╔ęį ╩Ū╬─ūųĪółDŽ±Īó┬Ģ궥╚╬’└ĒīŹ¾wŻ¼ę▓┐╔ęį╩ŪÜŌ║“╗“Łh(hu©ón)Š│Ą╚│ķŽ¾╠ō¾wĪŻĘ■äšÖCŲ„╚╦Ą─Ī░č█Š”Ī▒ (Ė„ĘNÖCŲ„ęĢėXŽĄĮy(t©»ng))╣żū„▀^│╠┼c╚╦č█ŅÉ╦ŲŻ¼ę▓╩Ūė╔ą┼Žó½@╚ĪĪółDŽ±╠Ä└ĒĪó╠žš„│ķ╚ĪĪó┼ąøQ ĘųŅÉĄ╚śŗ(g©░u)│╔ĪŻ
╚╦─śūRäeÖCŲ„╚╦Ą─Ī░č█Š”Ī▒Ą─ū„ė├ų„ę¬¾w¼F(xi©żn)į┌ęįŽ┬ÄūéĆĘĮ├µĪŻ
(1)Ę■äšÖCŲ„╚╦Ī░č█Š”Ī▒šJūųĪŻ└²╚ńŻ¼┤¾╝ęČ╝ų¬Ą└ą┼╝■═Č╚ļÓ]═▓║¾Ż¼ąĶę¬Įø(j©®ng)▀^Ó]Šų╣ż╚╦ ĘųÆ■▓┼─▄░l(f©Ī)═∙╩└ĮńĖ„ĄžĪŻ ę╗░ŃĄžšfŻ¼ ę╗éĆ╣ż╚╦ę╗╠ņų╗─▄ĘųÆ■2000Ī½3000ĘŌą┼Ż¼¼F(xi©żn)į┌▓╔ė├ ę╗ĘNÖCŲ„╚╦Ī░č█Š”Ī▒(Ó]š■ŠÄ┤aūRäeŽĄĮy(t©»ng))ĘųÆ■ät┐╔ęį╠ßĖ▀ą¦┬╩╩«ČÓ▒ČĪŻÖCŲ„╚╦Ī░č█Š”Ī▒šJ ūųĄ─įŁ└Ē┼c╚╦ŅÉšJūųĄ─▀^│╠┤¾¾wŽÓ╦ŲŻ¼╦³Ž╚ī”▌ö╚ļĄ─Ó]š■ŠÄ┤a▀MąąĘų╬÷║═│ķ╚Ī╠žš„ĪŻŲõ ┤╬╩Ū▀Mąąī”▒╚Ż¼╝┤░č│ķ╚ĪĄ─╠žš„┼cįŁŽ╚ęÄ(gu©®)Č©Ą─0Ī½9▀@10éĆĘ¹╠¢Ą─╠žš„▀Mąą▒╚▌^Ż¼┼c── éĆöĄ(sh©┤)ūųĄ─╠žš„ZŽÓ╦ŲŠ═╩Ū──éĆöĄ(sh©┤)ūųĪŻį┌─Ż╩ĮūRäe└ĒšōųąŻ¼▀@ĘNĘĮĘ©Įąū÷Įy(t©»ng)ėŗūRäeĘ©ĪŻĘ■ äšÖCŲ„╚╦Ī░č█Š”Ī▒šJūų│²┴╦ė├ė┌Ó]š■ŽĄĮy(t©»ng)═ŌŻ¼▀Ć┐╔ė├ė┌╩ųīæ╬─ūų▌ö╚ļĪóūC╝■ĪóŲ▒ō■(j©┤)Īó▄ć┼ŲĄ─ ūRäeĄ╚įSČÓĘĮ├µĪŻ
(2)Ę■äšÖCŲ„╚╦Ī░č█Š”Ī▒ūRłDĪŻ└²╚ńŻ¼╣ż╚╦ė├öĄ(sh©┤)┐žÖC┤▓╝ė╣ż┴Ń╝■ę¬Ū¾Ž╚┐┤Č«łD╝ł▓┼ąąĪŻ ─▄ʱūīĘ■äšÖCŲ„╚╦Ī░č█Š”Ī▒üĒūRäełD╝ł─ž?▀@Š═╩ŪĘ■äšÖCŲ„╚╦Ī░č█Š”Ī▒Ą─ūRłDå¢Ņ}ĪŻĘ■äš ÖCŲ„╚╦Ī░č█Š”Ī▒ūRłDĄ─ĘĮĘ©│²┴╦Įy(t©»ng)ėŗĘĮĘ©═Ō▀ĆėąšZčįĘ©Ż¼╦³╩Ū╗∙ė┌╚╦ŅÉšJūR▀^│╠ųąęĢėX║═šZčįĄ─┬ō(li©ón)ŽĄČ°Į©┴óĄ─Ż¼╝┤Å─łDŽ±ĮY(ji©”)śŗ(g©░u)╚ļ╩ųŻ¼░čłDŽ±ĘųĮŌ│╔ę╗ą®ų▒ŠĆĪóą▒ŠĆĪóš█ŠĆĪó³cĪó╗ĪĄ╚ ╗∙▒Šį¬╦žŻ¼čąŠ┐╦³éā╩Ū░┤šš╩▓├┤śėĄ─ęÄ(gu©®)ätśŗ(g©░u)│╔łDŽ±Ą─Ż¼Öz▓ķ┤²ūRäełDŽ±╩Ūī┘ė┌──ę╗ŅÉĪ░Šõ ą═Ī▒,╩ŪĘ±Ę¹║ŽŅAŽ╚ęÄ(gu©®)Č©Ą─ŠõĘ©ĪŻ░┤šš▀@éĆįŁätŻ¼╚¶ŠõĘ©š²┤_Š═─▄ūRäe│÷üĒĪŻĘ■äšÖCŲ„╚╦ Ī░č█Š”Ī▒ūRłDėąÅVĘ║Ą─æ¬ė├Ż¼į┌╣żśI(y©©)Īó▐r(n©«ng)śI(y©©)Īóć°Ę└Īó┐ŲčąĪóīŹ“×Īóßt(y©®)»¤ĪóĮ╠ė²ĪóŖ╩śĘĄ╚Ė„éĆŅI(l©½ng)ė“ ųąŻ¼╔µ╝░┤¾┴┐Ą─ūRłDå¢Ņ}Ż¼Č╝┐╔ęįė├Ę■äšÖCŲ„╚╦Ī░č█Š”Ī▒üĒūRäeĪŻ
(3)Ę■äšÖCŲ„╚╦Ī░č█Š”Ī▒šJ╬’ĪŻ└²╚ńŻ¼Ę■äšÖCŲ„╚╦Ī░č█Š”Ī▒ūRäe╬’¾w(3D ūRäeŽĄĮy(t©»ng))ę╗░Ń ęįözŽ±ÖCū„×ķą┼Žó▌ö╚ļŽĄĮy(t©»ng)Ż¼Ė∙ō■(j©┤)╚╦ŅÉūRäeŠ░╬’ų„ę¬┐┐├„░Ąą┼ŽóĪóŅü╔½ą┼ŽóĪóŠÓļxą┼ŽóĄ╚ įŁ└ĒŻ¼Ę■äšÖCŲ„╚╦Ī░č█Š”Ī▒ūRäe╬’¾wę▓╩Ū▌ö╚ļ▀@╚²ĘNą┼ŽóĪŻė╔ė┌özŽ±ÖC╦∙┼─özĄ─ĘĮŽ“▓╗ ═¼Ż¼┐╔ęįĄ├ĄĮĖ„ĘNłDą╬║═łDŽ±Ż¼╚ń│ķ╚Ī│÷┴óĘĮą╬╬’¾wĄ─D³cöĄ(sh©┤)║═ŲĮąąŠĆĮMöĄ(sh©┤)Ą╚┴óĘĮ¾wĄ─ ╣▓═¼╠žš„Ż¼ģóšš╩┬Ž╚┤µā”į┌ėŗ╦ŃÖCųąĄ─╬’¾w╠žš„▒ĒŻ¼▒Ń┐╔ęįūRäe┴óĘĮ¾w┴╦ĪŻ─┐Ū░Ż¼Ę■äšÖC Ų„╚╦Ī░č█Š”Ī▒▓╗āH┐╔ęįūRäe│÷║åå╬ą╬ĀŅĄ─╬’¾wŻ¼ī”ė┌Ū·├µ╬’¾w╗“ļŖūėį¬╝■Ą╚Å═ļsą╬ĀŅĄ─╬’ ¾w║═╩ę═ŌŠ░╬’ūRäeę▓ėą┴╦║▄┤¾Ą─▀Mš╣ĪŻĘ■äšÖCŲ„╚╦Ī░č█Š”Ī▒ūRäe╬’¾w┐╔ęįė├ė┌Ė„ŅÉ«a(ch©Żn)ŲĘ═Ōė^Öz▓ķŻ¼┴Ń╝■Ęų▀x║═š¹ÖCčb┼õĄ╚įSČÓĘĮ├µĪŻŽ┬├µĮķĮBę╗éĆĘ■äšÖCŲ„╚╦Ī░č█Š”Ī▒Ą─īŹ└²ĪŻ
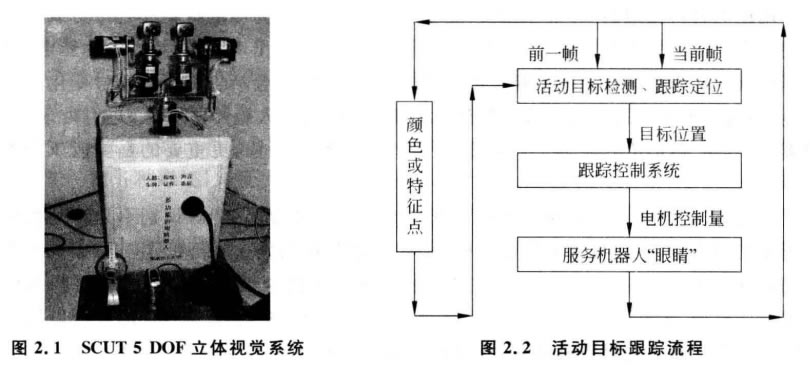
łD2.1╦∙╩ŠĄ─Ę■äšÖCŲ„╚╦Ī░č█Š”Ī▒╩Ūę╗éĆ5 DOF ┴ó¾węĢėXŽĄĮy(t©»ng)Ż¼╦³─▄ē“Ė·█Ö║═ūRäe╗Ņ äėĄ──┐ś╦ĪŻ╦³╩Ūė╔ SCUT Ī░ųŪ─▄ėŗ╦ŃÖCĪ▒┐ŲčąłFĻĀčąųŲ│╔╣”Ą─ĪŻįōĪ░č█Š”Ī▒░³└©ā╔éĆ▓╩╔½ özŽ±ÖCĪółDŽ±╠Ä└Ē░ÕĪóéĆ╚╦ļŖ─XĪóöĄ(sh©┤)ō■(j©┤)▓╔╝»┐©Īó5éĆų▒┴„ļŖÖCĪóų▒┴„ļŖÖC“ī(q©▒)äėŲ„ĪŻ┐╝æ]ĄĮų„ äėĖ·█Ö║═─┐ś╦╠žš„┼c╦┘Č╚║═¶ö░¶ąįĄ╚ę¬Ū¾Ż¼įōĪ░č█Š”Ī▒ęį╗∙ė┌Ņü╔½Ą─Ė·█Ö╦ŃĘ©×ķ╗∙ĄAŻ¼ĮY(ji©”) ║Ž─┐ś╦╠žš„Ė·█Ö╝░─┐ś╦▀\äėŅA£yĄ╚Š═┐╔ęįī”╗Ņäė─┐ś╦▀MąąĖ·█Ö║═ūRäeĪŻ
SCUT 5 DOF ┴ó¾węĢėXŽĄĮy(t©»ng)Ė·█Ö╗Ņäė─┐ś╦Ą─┴„│╠╚ńłD2.2╦∙╩ŠĪŻį┌─┐ś╦ūRäeųąŻ¼ė╔ ė┌─┐ś╦╠žš„Ė·█ÖąĶę¬ėŗ╦Ń╣Ō┴„ł÷Ż¼═¼Ģr▀Ćę¬ī”ČÓéĆ╠žš„▀MąąŲź┼õĄ╚Ż¼ėŗ╦Ń┴┐▒╚╗∙ė┌Ņü╔½ Ą─Ė·█Ö╦ŃĘ©Ė³┤¾Ż¼▓óŪę─┐ś╦Öz£y▓╔ė├┴╦Ņü╔½─Żą═Ą╚Ż¼╦∙ęįį┌ī”─┐ś╦▀MąąĖ·█ÖĢrŻ¼ÖCŲ„╚╦ Ī░č█Š”Ī▒ęįŅü╔½Ė·█Ö×ķų„Ż¼į┌┼ąöÓŅü╔½Ė·█Ö╩¦öĪĢrŻ¼į┘åóė├─┐ś╦╠žš„Ė·█Ö╝░─┐ś╦▀\äėŅA£yŻ¼ ų▒ĄĮŅü╔½Ė·█Ö╗ųÅ═š²│Ż×ķų╣ĪŻ
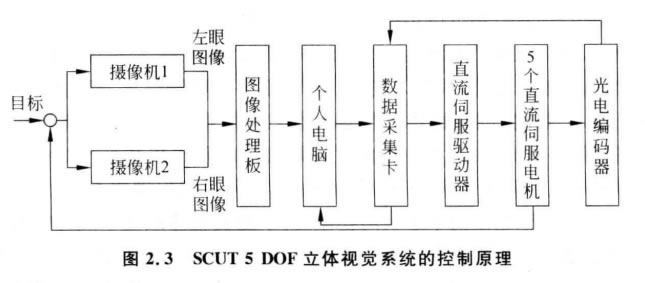
SCUT 5 DOF ┴ó¾węĢėXŽĄĮy(t©»ng)Ą─┐žųŲįŁ└Ē╚ńłD2.3╦∙╩ŠŻ¼ā╔éĆ▓╩╔½özŽ±ÖC┼─öz┤²ūRäe ─┐ś╦łDŽ±Ż¼Įø(j©®ng)▀^łDŽ±╠Ä└Ē░Õ║¾╦═╚ļéĆ╚╦ļŖ─X▀MąąĘų╬÷Ż¼Įø(j©®ng)▀^Ņü╔½╗“╠žš„Ė·█Ö╦ŃĘ©╠Ä└Ē║¾Ż¼ ą╬│╔5éĆų▒┴„ļŖÖCĄ─▐D(zhu©Żn)ĮŪ┐žųŲųĖ┴ŅŻ¼▓óĮø(j©®ng)ė╔öĄ(sh©┤)ō■(j©┤)▓╔╝»┐©║═ų▒┴„ļŖÖC“ī(q©▒)äėŲ„Ę┼┤¾║¾“ī(q©▒)äė5éĆų▒┴„ļŖÖC▐D(zhu©Żn)äėŻ¼Å─ȰĦäėā╔éĆözŽ±ÖCĘųäe╗“╣▓═¼ū„╔ŽĪóŽ┬Īóū¾ĪóėęĪóą²▐D(zhu©Żn)▀\äėŻ¼Ė·█Ö┤²ūR äe─┐ś╦ĪŻ¤ošō┤²ūRäeĄ──┐ś╦į§śė╗ŅäėŻ¼ų╗ę¬▓╗ļxķ_ā╔éĆözŽ±ÖCĄ─ęĢėXĘČć·Ż¼▀@éĆĖ·█Ö║═ ūRäe▀^│╠Š═ę╗ų▒│ų└m(x©┤)Ąž▀MąąŽ┬╚źĪŻė╔łD2 .3┐╔ęį┐┤ĄĮŻ¼5éĆų▒┴„ļŖÖCĄ─▌ö│÷(╦³éāĄ─▐D(zhu©Żn) äėŻ¼╝┤ā╔éĆözŽ±ÖCĄ─▀\äė)╩Ūų▒Įė▀BĮėĄĮ╗“š▀šfĖ·█Ö─┐ś╦Ą─ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |