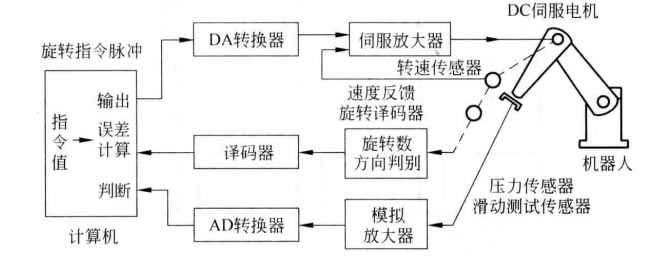
Å─ÖCŲ„╚╦┐žųŲĄ─╠Ä└ĒĘĮ╩ĮüĒ┐┤Ż¼Ųõ┐žųŲĮYśŗę╗░Ń┐╔ęįĘų×ķ┤«ąą║═▓óąąā╔ĘNĮYśŗ ŅÉą═ ĪŻ
(1)┤«ąą┐žųŲĮYśŗĪŻ╩ŪųĖÖCŲ„╚╦Ą─┐žųŲ╦ŃĘ©╩Ūė╔┤«ąąėŗ╦ŃÖCüĒ╠Ä└ĒĪŻ▀@ĘNŅÉą═Ą─┐žųŲŲ„Å─ėŗ╦ŃÖCĮYśŗĪó┐žųŲĘĮ╩Įėų┐╔Ęų×ķęįŽ┬ÄūĘN89]ĪŻ
ó┘ å╬CPU ĮYśŗĪó╝»ųą┐žųŲĘĮ╩ĮĪŻė├ę╗┼_╣”─▄▌^ÅŖĄ─ėŗ╦ŃÖCīŹ¼F╚½▓┐┐žųŲ╣”─▄ĪŻ
ó┌ Č■ JCPU ĮYśŗĪóų„Å─╩Į┐žųŲĘĮ╩ĮĪŻ ę╗JCPU ×ķų„ÖCŻ¼ō·«öŽĄĮy╣▄└ĒĪóŠÄūg║═╚╦ÖC Įė┐┌╣”─▄Ż¼═¼Ģrę▓═Ļ│╔ū°ś╦ūāōQĪó▄ē█E▓ÕčaŻ¼Č©ĢrĄž░č▀\╦ŃĮY╣¹ū„×ķĻP╣Ø▀\äėĄ─į÷┴┐╦═ĄĮ ╣½ė├ā╚┤µŻ¼╣®Č■J CPU ūx╚ĪŻ╗Č■J CPU ═Ļ│╔╚½▓┐ĻP╣Ø╬╗ų├öĄūų┐žųŲĪŻ
ó█ ČÓCPU ĮYśŗĪóĘų▓╝╩Į┐žųŲĘĮ╩ĮĪŻ─┐Ū░┤¾ČÓöĄ╔╠ŲĘ╗»ÖCŲ„╚╦┐žųŲŲ„Č╝╩Ū▀@ĘNĮYśŗĪŻ ╦³ų„ę¬▓╔ė├╔ŽĪóŽ┬╬╗ÖCČ■JĘų▓╝╩ĮĮYśŗŻ¼╔Ž╬╗ÖCžōž¤š¹éĆŽĄĮy╣▄└Ēęį╝░▀\äėīWėŗ╦Ń║═▄ē Īż █EęÄäØĄ╚ĪŻŽ┬╬╗ÖCė╔ČÓCPU ĮM│╔Ż¼├┐éĆCPU ┐žųŲę╗éĆĻP╣Ø▀\äėŻ¼▀@ą® CPU ║═ų„┐žÖC┬ō ŽĄ╩Ū═©▀^┐éŠĆą╬╩ĮĄ─Šo±Ņ║ŽĪŻ
╔Ž╩÷╚²ŅÉ┐žųŲŲ„Č╝╩Ū▓╔ė├┤«ąąĘĮ╩ĮüĒėŗ╦ŃÖCŲ„╚╦Ą─┐žųŲ╦ŃĘ©ĪŻ╦³éā┤µį┌Ą─ę╗éĆ╣▓ ═¼╚§³c╩Ūėŗ╦Ńžōō·ųžĪóīŹĢrąį▓ŅĪŻ╦∙ęį┤¾ČÓ▓╔ė├ļxŠĆęÄäØ║═Ū░üčaāöĮŌ±ŅĄ╚ĘĮĘ©üĒ£p▌p īŹĢr┐žųŲųąĄ─ėŗ╦Ńžōō·ĪŻ«öÖCŲ„╚╦į┌▀\ąąųą╩▄ĄĮĖ╔ö_ĢrŲõąį─▄īó╩▄ĄĮė░ĒæŻ¼Ė³ļyęį▒ŻūC Ė▀╦┘▀\äėųą╦∙ę¬Ū¾Ą─Š½Č╚ųĖś╦ĪŻ
(2)▓óąą╠Ä└ĒĮYśŗĪŻ▓óąą╠Ä└Ē╝╝ąg╩Ū╠ßĖ▀ėŗ╦Ń╦┘Č╚Ą─ę╗éĆųžę¬╩ųČ╬Ż¼─▄ØMūŃÖCŲ„╚╦┐žųŲĄ─īŹĢrąįę¬Ū¾ĪŻÖCŲ„╚╦┐žųŲŲ„▓óąą╠Ä└Ē╝╝ąg蹊┐▌^ČÓĄ─╩ŪÖCŲ„╚╦▀\äėīW║═äė┴”īW Ą─▓óąąėŗ╦Ń╦ŃĘ©╝░ŲõīŹ¼FĪŻ1982─ĻŻ¼J.Y.S.Luh ┤╬╠ß│÷ÖCŲ„╚╦äė┴”īW▓óąą╠Ä└Ēå¢ Ņ}Ż¼▀@╩Ūę“×ķĻP╣Øą═ÖCŲ„╚╦Ą─äė┴”īWĘĮ│╠╩Ūę╗ĮMĘŪŠĆąįÅŖ±Ņ║ŽĄ─Č■ļA╬óĘųĘĮ│╠Ż¼Ū¾ĮŌėŗ ╦Ń╩«ĘųÅ═ļs[90]ĪŻ╠ßĖ▀ÖCŲ„╚╦äė┴”īW╦ŃĘ©ėŗ╦Ń╦┘Č╚┐╔ęį×ķīŹ¼FÅ═ļsĄ─ėŗ╦Ń┴”ŠžĘ©ĪóĘŪŠĆąįŪ░üĘ©Īóūį▀mæ¬┐žųŲĘ©Ą╚┤“Ž┬╗∙ĄAĪŻķ_░l▓óąą╦ŃĘ©Ą─═ŠÅĮų«ę╗Š═╩ŪĖ─įņ┤«ąą╦ŃĘ©Ż¼╩╣ų« ▓óąą╗»Ż¼╚╗║¾īó╦ŃĘ©ė│╔õĄĮ▓óąąĮYśŗĪŻśŗįņ▓óąą┐žųŲĮYśŗĄ─ÖCŲ„╚╦┐žųŲŲ„ę╗░Ń▓╔ė├ęįŽ┬ ĘĮ╩ĮĪŻ
ó┘ķ_░lÖCŲ„╚╦┐žųŲīŻė├VLSI, ę└ ┐┐ VLSI ąŠŲ¼ā╚▓óąą¾wŽĄĮYśŗĮŌøQÖCŲ„╚╦┐žųŲ╦Ń Ę©ųą┤¾┴┐Ą─ėŗ╦ŃŻ¼╠ßĖ▀▀\äėīW║═äė┴”īWĘĮ│╠Ą─ėŗ╦Ń╦┘Č╚91]ĪŻ
ó┌└¹ė├ėą▓óąą╠Ä└Ē─▄┴”Ą─ąŠŲ¼╩Įėŗ╦ŃÖCśŗ│╔▓óąą╠Ä└ĒŠWĮjŻ¼▒╚╚ńėóć°Inmos ╣½╦Ščą ųŲ▓ó╔·«aĄ─▓óąą╠Ä└ĒąŠŲ¼╩Įėŗ╦ŃÖCTransputerĪŻ
ó█└¹ė├═©ė├Ą─╬ó╠Ä└ĒŲ„śŗ│╔▓óąą╠Ä└ĒĮYśŗų¦│ųėŗ╦ŃŻ¼īŹ¼FÅ═ļs┐žųŲ▓▀┬įį┌ŠĆīŹĢrėŗ ╦Ń[92],įöęŖģó┐╝╬─½I[99]ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |