░┤ššÖCŲ„╚╦Ą─┐žųŲĘĮ╩Į┐╔░čÖCŲ„╚╦Ęų×ķĘŪ ╦┼Ę■ÖCŲ„╚╦║═╦┼Ę■┐žųŲÖCŲ„╚╦ā╔ĘNĪŻ
(1)ĘŪ╦┼Ę■ÖCŲ„╚╦
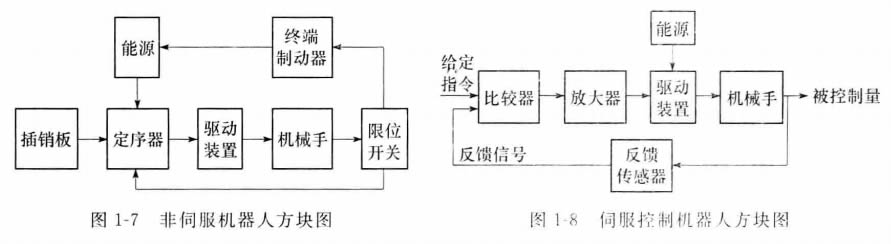
ĘŪ╦┼Ę■ÖCŲ„╚╦(non-servo robot)╣żū„─▄┴”▒╚▌^ėąŽ▐Ż¼╦³éā═∙═∙╔µ╝░─Ūą®Įąū÷Ī░ĮK³cĪ▒Īó Ī░ūźĘ┼Ī▒╗“Ī░ķ_ĻPĪ▒╩ĮÖCŲ„╚╦Ż¼ė╚Ųõ╩ŪĪ░ėąŽ▐Ēśą“Ī▒ÖCŲ„╚╦ĪŻ▀@ĘNÖCŲ„╚╦░┤ššŅAŽ╚ŠÄ║├Ą─│╠ą“Ēśą“▀Mąą╣żū„Ż¼╩╣ė├ĮKČ╦Ž▐╬╗ķ_ĻPĪóųŲäėŲ„Īó▓ÕõN░Õ║═Č©ą“Ų„üĒ┐žųŲÖCŲ„╚╦ÖCąĄ╩ųĄ─▀\äėĪŻŲõ╣żū„įŁ└ĒĘĮēKłD╚ńłD1- 7╦∙╩ŠĪŻłDųąŻ¼▓ÕõN░Õė├üĒŅAŽ╚ęÄČ©ÖCŲ„╚╦Ą─╣żū„Ēśą“Ż¼ Č°Ūę═∙═∙╩Ū┐╔š{Ą─ĪŻČ©ą“Ų„╩Ūę╗ĘNČ©ą“ķ_ĻP╗“▓Į▀Mčbų├Ż¼╦³─▄ē“░┤ššŅAČ©Ą─š²┤_Ēśą“Įė═© “īäėčbų├Ą──▄į┤ĪŻ“īäėčbų├Įė═©─▄į┤║¾Ż¼Š═ĦäėÖCŲ„╚╦Ą─╩ų▒█Īó═¾▓┐║═ūź╩ųĄ╚čbų├▀\äėĪŻ «ö╦³éāęŲäėĄĮė╔ĮKČ╦Ž▐╬╗ķ_ĻP╦∙ęÄČ©Ą─╬╗ų├ĢrŻ¼Ž▐╬╗ķ_ĻPŪąōQ╣żū„ĀŅæBŻ¼╦═ĮoČ©ą“Ų„ę╗éĆ Ī░╣żū„╚╬äš(╗“ęÄČ©▀\äė)śIęč═Ļ│╔Ī▒Ą─ą┼╠¢Ż¼▓ó╩╣ĮKČ╦ųŲäėŲ„äėū„Ż¼ŪąöÓ“īäė─▄į┤Ż¼╩╣ÖC ąĄ╩ų═Żų╣▀\äėĪŻ
(2)╦┼Ę■┐žųŲÖCŲ„╚╦
╦┼Ę■┐žųŲÖCŲ„╚╦(servo-controlled robot)▒╚ĘŪ╦┼Ę■ÖCŲ„╚╦ėąĖ³ÅŖĄ─╣żū„─▄┴”Ż¼ę“Č°ārĖ±▌^┘FŻ¼Ą½į┌─│ą®ŪķørŽ┬▓╗╚ń║åå╬Ą─ÖCŲ„╚╦┐╔┐┐ĪŻłD1-8▒Ē╩Š╦┼Ę■┐žųŲÖCŲ„╚╦Ą─ĘĮēKłDĪŻ ╦┼Ę■ŽĄĮyĄ─▒╗┐žųŲ┴┐(▌ö│÷)┐╔×ķÖCŲ„╚╦Č╦▓┐ł╠ąąčbų├(╗“╣żŠ▀)Ą─╬╗ų├Īó╦┘Č╚Īó╝ė╦┘Č╚║═┴” Ą╚ĪŻ═©▀^Ę┤üé„ĖąŲ„╚ĪĄ├Ą─Ę┤üą┼╠¢┼cüĒūįĮoČ©čbų├(╚ńĮoČ©ļŖ╬╗Ų„)Ą─ŠC║Žą┼╠¢Ż¼ė├▒╚▌^Ų„╝ėęį▒╚▌^║¾Ż¼Ą├ĄĮš`▓Ņą┼╠¢Ż¼Įø▀^Ę┼┤¾║¾ė├ęį╝ż░lÖCŲ„╚╦Ą─“īäėčbų├Ż¼▀MȰĦäė─®Č╦ł╠ ąąčbų├ęįę╗Č©ęÄ┬╔▀\äėŻ¼ĄĮ▀_ęÄČ©Ą─╬╗ų├╗“╦┘Č╚Ą╚ĪŻ’@╚╗Ż¼▀@Š═╩Ūę╗éĆĘ┤ü┐žųŲŽĄĮyĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |